中文
028-86285168
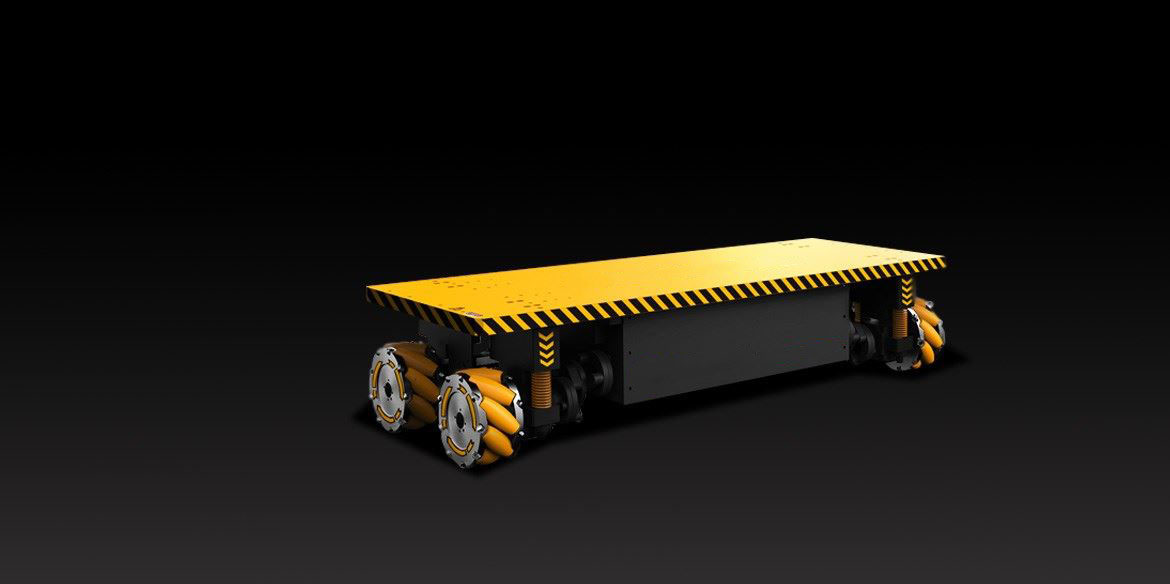
全向智能移动平台
项目概述及解决的关键技术
全向智能移动平台在二维平面上产生3 个自由度的全向运动,能够沿着任意路径到达目标地点,尤其在狭窄或拥挤的环境中,它仍然具有灵活运动的特性,该移动平台同时有效解决了长形物料在狭窄空间的转运问题。
该移动平台主要包括驱动系统,姿态调整系统,控制系统,能源系统等。我们运用刚体动力学理论,有效解决了空间自由度分配、运动参数合成、摩擦阻力控制等多项关键技术,实现了移动平台多工况条件下的全向运动。
我们提供的服务
我们承担了该移动平台从概念到数字样机的设计研发任务,包括:机械设计、结构设计、智能化设计研发、工业设计、PI设计、样机制造支持





 联系我们
联系我们